
مقالات
ساخت یک سامانهی شبیهساز واقعگرا به دست محققان MIT برای آموزش خودروهای خودران
خلاصه :
محققان انستیتو فناوری ماساچوست موفق به ساخت یک سیستم شبیهسازی شدهاند که به کمک هوش مصنوعی میتواند برای آموزش خودروی خودران در شرایط خاص و پیچیده مورد استفاده قرار گیرد.شبیهسازها سالها است که برای آموزش رانندگان، خلبانان و فضانوردان مورد استفاده قرار میگیرند و اکنون از آنها برای آموزش خودروی خودران نیز استفاده میشود و سیستم جدیدی که توسط محققان انستیتو فناوری ماساچوست (MIT) ساخته شده، امیدبخشترین مورد کنونی است.
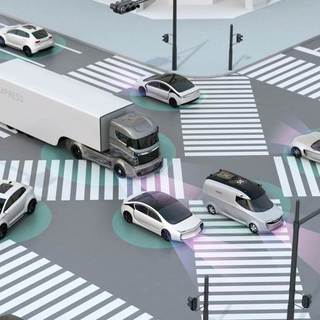
در سیستم شبیهسازی ترکیب و تبدیل تصویر مجازی برای خودمختاری (VISTA) خودروهای خودران مجبور نیستند مستقیماً وارد خیابان واقعی شوند. در عوض آنها میتوانند از طریق دنیای مجازی ایجاد شده همراهبا تعداد نامحدودی از امکانات فرماندهی، حرکت کنند.
چنین فناوری بهویژه برای شرایط خاص (edge case) مفید است؛ حوادث نادر مانند تصادف بالقوه یا مجبور شدن به تردد در مسیرهای خارج از جاده یا آفرود از جمله مواردی است که به آن شرایط خاص گفته میشود. در این شرایط، اطلاعات کاملی از دنیای واقعی در دسترس نیست تا خودروهای خودران بتوانند از آنها بهعنوان مدل آموزش استفاده کنند. در داخل VISTA، این رویدادها میتوانند با خیال راحت تجربه شوند.
هنگامی که کنترلر خودروی بدون راننده در داخل شبیهسازی قرار میگیرد، فقط مجموعه دادههای کوچکی از رانندگی واقعی انسان به آن داده میشود. کنترلکننده باید خود بیاموزد که چگونه با خیال راحت از نقطهی A به B برسد و برای مسافرت بیشتر پاداش میگیرد.
هنگامی که کنترلر خودروی خودران اشتباه کند، سیستم از آنچه با عنوان یادگیری تقویتکننده شناخته میشود، برای آموزش کنترلر خودروی خودران استفاده میکند تا دفعه بعدی انتخاب بهتری داشته باشد. کنترلر به تدریج میتواند بدون تصادف برای مدت طولانیتری رانندگی کند.
الکساندر امینی، دانشجوی دکترای آزمایشگاه علوم کامپیوتر و هوش مصنوعی (CSAIL) دانشگاه MIT دراینزمینه میگوید:
جمعآوری داده در این موارد حاشیهای (موارد خاص) که انسانها در جاده تجربه نمیکنند، دشوار است. با این حال، در شبیهسازی ما، سیستمهای کنترل میتوانند آن شرایط را تجربه کنند، خودشان بیاموزند که طبق آن شرایط بهبود یابند و هنگام استقرار روی وسایل نقلیه در واقعیت، کارا بمانند.
پیش از این از موتورهای شبیهسازی برای آمادگی و آموزش خودروهای خودران استفاده شده است؛ اما معمولاً اختلافهایی بین دنیای مصنوعی شبیهسازیشده توسط هنرمندان و مهندسان برای شبیهساز و دنیای واقعی در خارج وجود دارد.
در مورد VISTA، شبیهساز توسط دادهها هدایت میشود؛ بنابراین عناصر جدید میتوانند از دادههای واقعی ترکیب شوند. از شبکه عصبی حلقوی (نوعی AI که معمولاً برای پردازش تصاویر استفاده میشود)، برای ترسیم صحنهای سهبعدی و ایجاد نمایش فوتورئالیستی استفاده میشود که کنترلکنندهی خودروی خودران میتواند به آن پاسخ دهد.
سایر اشیاء متحرک در صحنه، از جمله خودرو و افراد نیز میتوانند توسط شبکههای عصبی مجهز به VISTA، ترسیم شوند. این نوعی تغییر نسبت به مدلهای آموزش سنتی است که یا از قوانین تعریف شده توسط انسان پیروی میکنند یا سعی میکنند از آنچه رانندگان انسانی انجام میدهند، تقلید کنند.
امینی میگوید:
ما اساساً میگوییم، اینجا محیطی وجود دارد. شما میتوانید هر كاری را كه میخواهید انجام دهید. به وسایل نقلیه برخورد نکنید و داخل خطوط بمانید.
بهنظر میرسد که این فناوری در عمل نیز خوب کار میکند؛ کنترلری که ۱۰،۰۰۰ کیلومتر (۶،۲۱۴ مایل) با VISTA آموزش دیده و روی خودروی خودران واقعی پیوند یافته بود، توانست با خیال راحت در خیابانهای مسیری که قبلا ندیده بود، حرکت کند و از موقعیتهای تصادف بالقوه (مانند بیرون بودن نیمی از خودرو از جاده) سربلند بیرون آید. مرحله بعدی در این سیستم، معرفی پیچیدگیهایی مانند آبوهوای بد یا رفتار نامنظم و متغیر توسط سایر عناصر موجود در صحنه است.
برچسبهای این مطلب :
گالری تصاویر :

























ᎥᏞᎥᎪ ᎠᎾᏞᎪᏆᎥ
۵ سال پیش
msab3F
۵ سال پیش
ᎥᏞᎥᎪ ᎠᎾᏞᎪᏆᎥ
۵ سال پیش
روح الله صمدی
۵ سال پیش
روح الله صمدی
۵ سال پیش
محمد حسینمردی
۵ سال پیش
ᎥᏞᎥᎪ ᎠᎾᏞᎪᏆᎥ
۵ سال پیش
KOMEIL HOSSEINMARDI
۵ سال پیش
دورمامو
۵ سال پیش
ᎥᏞᎥᎪ ᎠᎾᏞᎪᏆᎥ
۵ سال پیش
محمدطاها صادقی دعوتی
۵ سال پیش